{kind=link}

Рис. 1. Камера Polaroid SONAR OneStep SX-70 использует ультразвуковой преобразователь (круглый, золотой модуль, видимый в верхней части) для автоматической фокусировки.
Системы автофокуса, роботы, дроны, различные типы устройств для ванных комнат и датчики для автоматических дверей — это лишь некоторые примеры устройств, которые требуют измерения расстояния, и их список продолжает расти. Конкурентные методы обнаружения расстояний начинаются с простых инфракрасных и ультразвуковых датчиков до более сложных систем, например стереоскопических камер с нейронными сетями.
Все эти методы имеют ограничения, и хотя искусственный интеллект может быть необходим для выполнения сложных задач, таких как распознавание объектов и отслеживание дорог автономными транспортными средствами, он слишком дорог, например, для диспенсеров бумажных полотенец и мыла. Дизайнеры, сталкивающиеся со все меньшим бюджетом и более коротким периодом проектирования, должны минимизировать затраты, пространство и время проектирования.
Одной из альтернатив, которые следует учитывать при реализации этих типов систем, являются датчики ToF, измеряющие расстояние до целевого объекта на основе времени возврата фотонов в обоих направлениях от датчика к объекту и обратно. До сих пор было трудно реализовать проекты ToF быстро и дешево, но новое поколение интегрированных и экономичных датчиков ToF изменило эту ситуацию.
В этой статье мы обсудим эволюцию использования технологии измерения расстояния, включая датчики ToF для определения расстояния и распознавания жестов. Далее мы опишем, как работают датчики ToF, и представим новейшие решения в этой области и способы их реализации.
Первые датчики приближения

Рис. 2. Ультразвуковой преобразователь SparkFun SEN-13959 использует отраженные импульсы 40 кГц для измерения расстояний
Камера Polaroid SX-70, выпущенная в 1972 году, получила выгоду от многих инновационных технологий, таких как оптическая система с тремя зеркалами и линзами Френеля, плоская 6-вольтовая батарея или 10-точечная вспышка. Однако одной из самых революционных технологий, представленных Polaroid, была система автофокусировки Sonar, впервые появившаяся в модели Polaroid SONAR OneStep, представленной в 1978 году (фото 1).
Система автоматической фокусировки SONAR использовала инновационный ультразвуковой преобразователь, задачей которого было посылать измерительный импульс и получать отраженную энергию.
Ультразвуковой преобразователь SONAR оказался настолько эффективным, что Polaroid создал отдельную компанию для своего развития, и влияние этого модуля на рынок можно наблюдать уже сегодня. Например, дешевый ультразвуковой преобразователь SparkFun SEN-13959 HRC-SR04 выполняет измерение расстояния, используя две отдельные секции: передатчик и приемник (фото 2). Этот преобразователь был разработан для непосредственного сотрудничества с советом разработчиков Arduino. Диапазон измерений составляет от 2 до 400 см, а разрешение составляет минимум 3 мм.
Чтобы измерить расстояние с помощью этого датчика, плата Arduino (или другой контроллер) отправляет импульс 10 мкс на выход Trig, генерируя серию из 8 коротких импульсов, излучаемых ультразвуковым передатчиком. Импульсы попадают в цель и отскакивают, преодолевая дорогу со скоростью 343 м / с (при 20 ° C). Расстояние до цели соответствует времени между отправкой и приемом ультразвуковых импульсов, умноженному на 343 м / с, деленному на 2 (чтобы учесть расстояние, пройденное в обоих направлениях).
Ультразвуковые импульсы хорошо отражаются от твердых поверхностей, а слабо — от мягких, таких как шторы, ковры, одежда или животные. Точность измерения зависит от метода, используемого для синхронизации импульсов. Модуль SparkFun SEN-13959 не обеспечивает этого, поэтому эта задача выполняется центральным процессором хост-устройства.
Кроме того, точность и стабильность измерения расстояния от ультразвукового преобразователя варьируется в зависимости от температуры воздуха (которая изменяет скорость распространения звука в воздухе) и движения воздуха (которое поднимает значительную часть отраженной ультразвуковой энергии и подавляет обратный сигнал).

Рис. 3. Преобразователь Sharp GP2Y0A41SK0F, работающий в инфракрасном диапазоне, позволяет обнаруживать объекты, расположенные на расстоянии от 3 до 40 см.
ИК-светодиоды также используются для обнаружения присутствия и измерения расстояний. Например, передатчик Sharp Microelectronics GP2Y0A41SK0F можно использовать для измерения расстояния от объекта в диапазоне от 4 до 30 см на основе измерения интенсивности отраженной волны, посылаемой ИК-светодиодом (фото 3). Датчик сигнализирует расстояние, генерирующее аналоговое напряжение, от примерно 3 В (что соответствует расстоянию 3 см) до примерно 0,3 В (что соответствует расстоянию 40 см). Хост-контроллер преобразует аналоговое напряжение в цифровой сигнал.
Однако, поскольку расстояние до объекта определяется на основе количества отраженной ИК-энергии, на точность датчиков этого типа влияет ошибка, зависящая от таких переменных, как отражательная способность объекта и интенсивность окружающего света.
Другой способ измерения расстояния от объекта с помощью ИК-излучения заключается в измерении времени пролета фотонов, генерируемых излучателем, отражающихся и возвращающихся в детектор. Этот тип датчика расстояния сочетает в себе характеристики ToF ультразвукового датчика со стабильной скоростью фотона, на которую не влияют движущийся воздух, окружающий свет или коэффициент отражения.

Рис. 4. Контроллер Microsoft Kinect для игровой консоли Xbox 360 использует измерение ToF для создания трехмерной карты окружающей среды.
До недавнего времени было трудно измерить время полета фотонов, движущихся на небольшие расстояния, поскольку скорость света составляет 299 792 458 м / с или около 30 см в наносекунду. В результате, чтобы измерить расстояние в несколько миллиметров или сантиметров, датчики ToF требуют очень точной синхронизации с разрешением ниже наносекунды.
Однако, благодаря индустрии видеоигр, сенсорная технология ToF стала намного дешевле. Пожалуй, наиболее известным в настоящее время использует датчик ToF является Kinect игровой контроллер от Microsoft (рис. 4). Microsoft Kinect первое поколение было начато в конце 2010 года в качестве периферийного устройства для Xbox 360 контроллера стал очень популярным среди дизайнеров роботов, потому что он был в состоянии генерировать трехмерный карты непосредственного окружения робота с помощью измерения расстояния на основе ToF.
Модуль контроллера Kinect был миниатюрен и упрощен для создания практичных датчиков измерения расстояния , которые подходят для многих встроенных приложений.
VCSEL лазеры и фотодиод SPAD
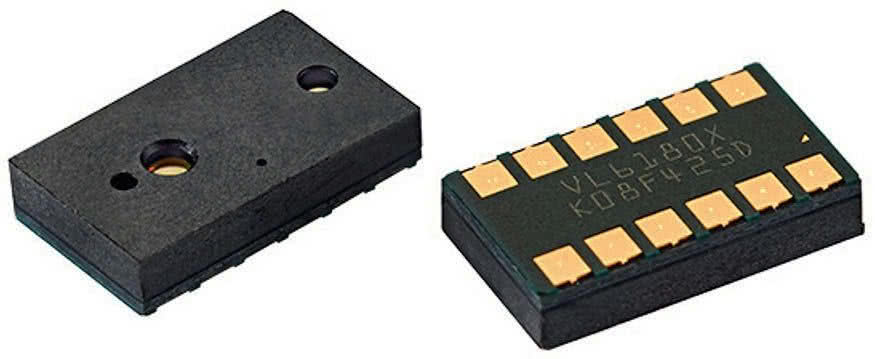
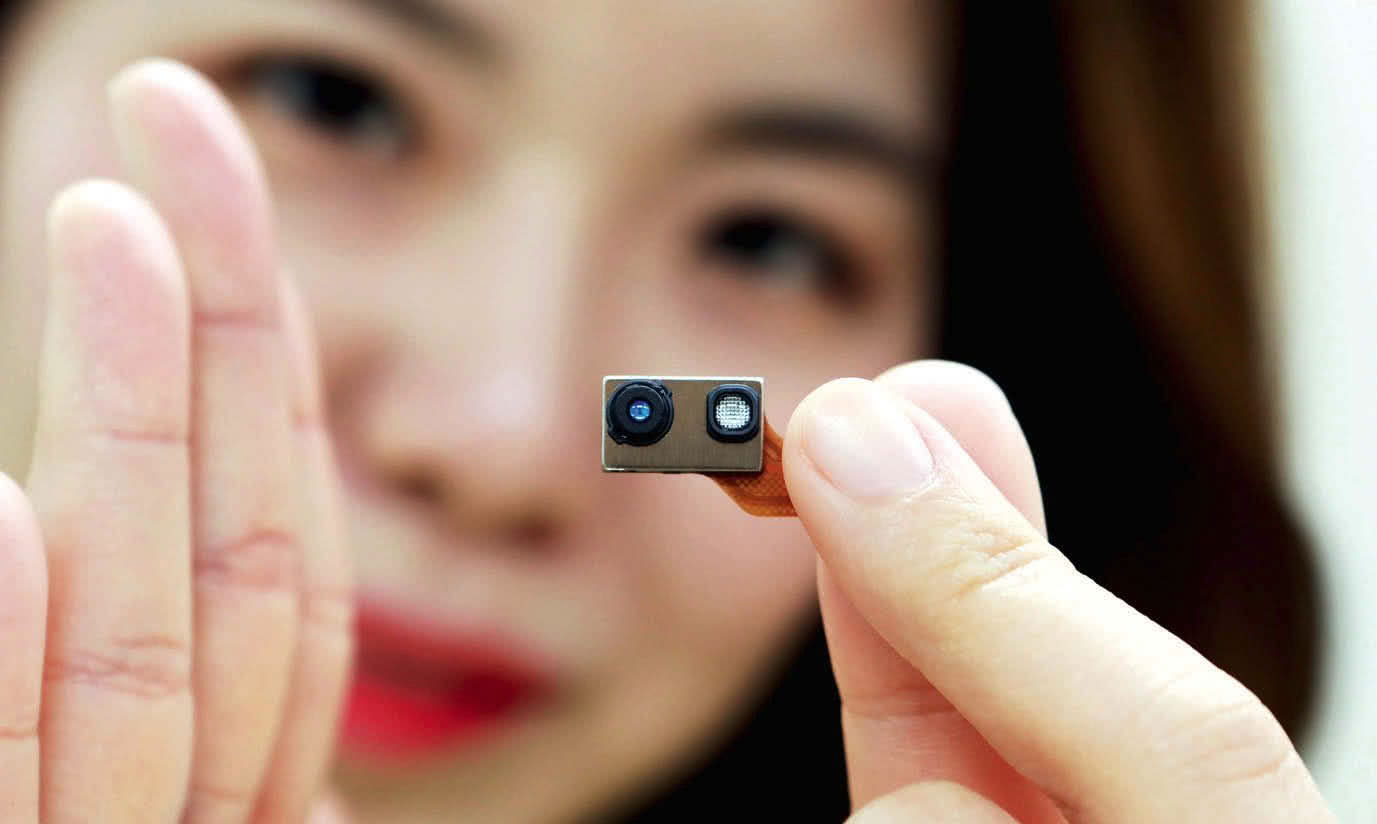
Рис. 5. Датчик VL6180X первого поколения из серии STMicroelectronics обеспечивает диапазон измерений до 100 мм.
Предложение STMicroelectronics теперь включает в себя широкий спектр миниатюрных датчиков ToF для измерения расстояния . Они основаны на современных измерительных технологиях, в которых используются фотодиоды VCSEL (вертикальная полость, лазер с поверхностным излучением) и SPAD (однофотонный лавинный фотодиод).
Три из новой линейки датчиков ToF — VL53L0CX, VL53L1CX и VL6180X. Хотя все они используются для измерения расстояний, каждый из них характеризуется различными возможностями.
Датчик ToL первого поколения VL6180X имеет один режим работы и измеряет расстояние от нескольких до 100 мм (фото 5). Он закрыт в корпусе с размерами 4,8 × 2,8 × 1,0 мм и обеспечивает поле зрения 42 °. Включает в себя встроенный датчик освещенности, который компенсирует изменения интенсивности внешнего освещения.

Рис. 6. Датчик VL53L0CX второго поколения от STMicroelectronics обеспечивает диапазон измерений до 1200 мм.
Датчик ToF второго поколения VL53-L0CX обеспечивает диапазон измерений от 50 до 1200 мм в помещении (фото 6). Он закрыт в корпусе с размерами 4,4 × 2,4 × 1,0 мм и имеет поле зрения 25 °. Из-за влияния окружающего света диапазон его измерений уменьшается до 600 … 800 мм при работе на открытом воздухе.
Датчик ToF третьего поколения VL53-L1CX предлагает три режима работы (фото 7). Диапазон измерения в коротком, среднем и длинном режимах составляет 1360, 2900 и 3600 мм при отсутствии внешнего освещения. При наличии сильного внешнего света диапазон измерения для этих режимов составляет 1350, 760 и 730 мм соответственно.
Хотя это не интуитивно понятно, диапазон измерения в коротком режиме является самым высоким при сильном наружном освещении. VL53L1CX инкапсулирован в корпусе 4,9 × 2,5 × 1,56 мм и имеет поле зрения 27 ° (поле зрения программируется и может быть сужено, как объяснено ниже).

Рис. 7. Датчик VL53L1CX третьего поколения STMicroelectronics обеспечивает дальность измерения почти 4 м.
Все три сообщают результат датчиков TOF измерить расстояние до принимающего микропроцессора с разрешением 1 мм с цифровым интерфейсом I²C, в то же время , действующем в качестве элемента управления интерфейсом. Благодаря этому они обеспечивают очень простое соединение с микропроцессором (фото 8).
Обратите внимание на особые требования к разъединяющим конденсаторам на линиях электропередач AVDDVCSEL и AVDD. Конденсаторы емкостью 100 нФ и 4,7 мкФ должны быть расположены как можно ближе к датчику, чтобы предотвратить шум от источника питания и, как следствие, ухудшение точности.
Эти датчики ToF работают в одном измерении. Они сигнализируют о наличии объектов в поле их зрения. Если в поле зрения много объектов, они измеряют расстояние до ближайшего. Один датчик не может определить направление жеста одной рукой, но его можно использовать для обнаружения четырех простых жестов , в том числе:
- однократное нажатие (рука опускается, чтобы «дотронуться» до датчика),
- двойное нажатие,
- одиночная смена (движение руки в поле зрения датчика),
- двойное смещение.
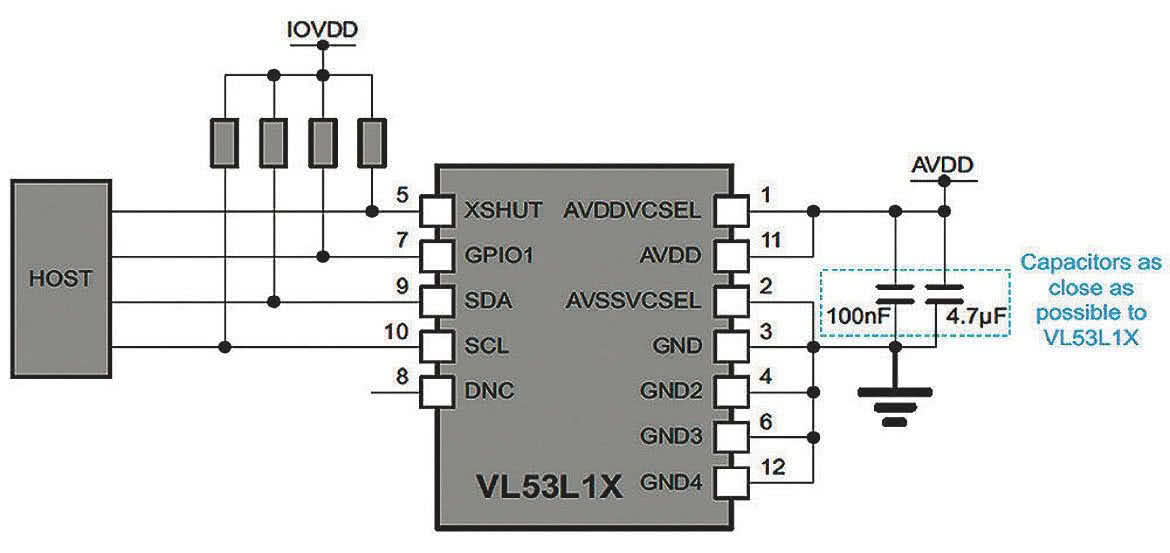
Рис. 8. Как и предыдущие датчики этого семейства, датчики VL53L1CX третьего поколения подключаются к главному микропроцессору через простой интерфейс I²C
Парные датчики ToF могут использоваться для различения движений слева направо и справа налево. Кроме того, можно получить больше информации от датчика VL53L1CX третьего поколения путем выборочного сужения его поля зрения. Это делается путем отключения отдельных фотодиодов SPAD в матрице с помощью команд, отправляемых через интерфейс I²C.
Вся матрица VL53L1CX содержит 256 (16 × 16) фотодиодов SPAD. Вы можете активировать любую квадратную или прямоугольную поверхность с помощью программной команды, которая задает два конкретных элемента в углах активной области. За счет уменьшения количества активных элементов поле зрения датчика уменьшается, а его ROI сужается. Единственным требованием здесь является одновременная активация не менее 16 (4 × 4) фотодиодов SPAD.
Конструкция системы с датчиками ToF
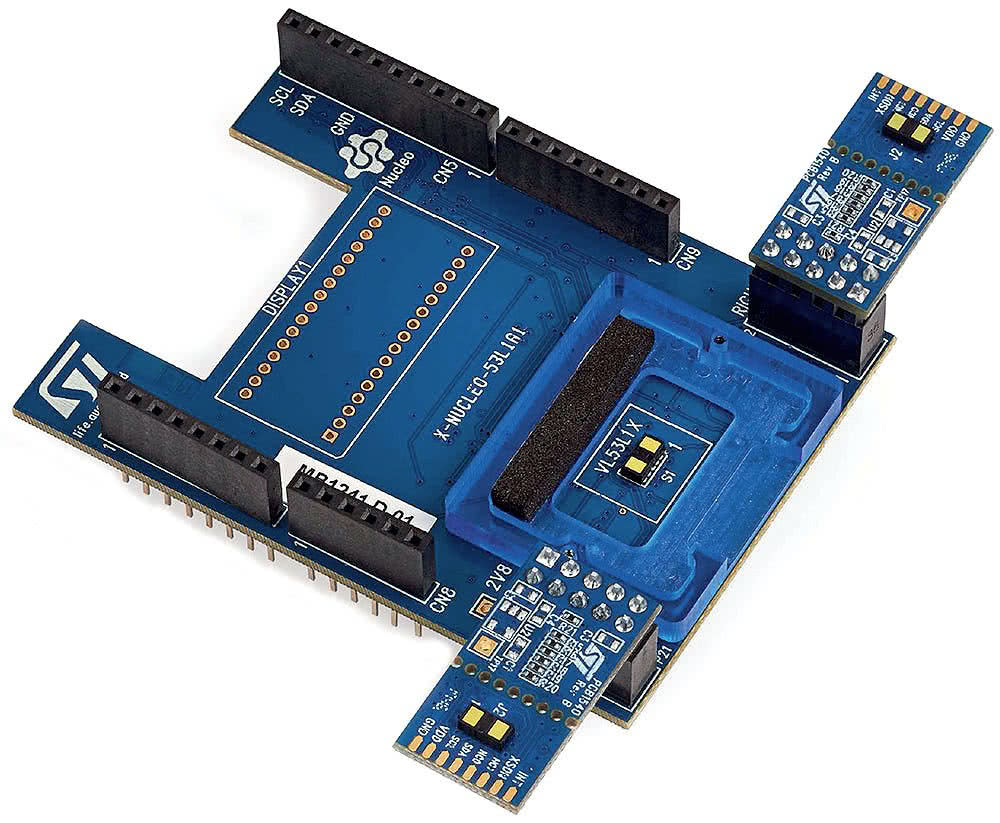
Рис. 9. Плата расширения из оценочного набора P-NUCLEO-53L1A1 от STMicroelectronics включает в себя один датчик ToF с символом V53L1X и позволяет подключать два последовательных датчика этого типа, расположенных на взаимодействующих пластинах.
Для облегчения начала проектирования для датчика VL53L1CX был разработан оценочный комплект P-NUCLEO-53L1A1. Он включает в себя оценочную плату STM32F401RE Nucleo с микроконтроллером STM32 от STMicroelectronics и плату расширения X-NUCLEO-53L1A1, установленную на плате микроконтроллера и позволяющую соединить две пластины, взаимодействующие с установленными датчиками VL53L1X, также входящими в комплект (фото 9).
Оценочный набор P-NUCLEO-53L1A1 также включает в себя системное программное обеспечение и примеры исходных кодов, чтобы облегчить начало проекта. STMicroelectronics также предлагает дополнительные модули для измерения расстояния и распознавания жестов с пакетом программного обеспечения TOF для пакета программного обеспечения STM32Cube. Они адаптированы для отдельных типов датчиков и могут быть бесплатно загружены с веб-сайта STMicroelectronics.
Из-за своих небольших размеров датчики STMicroelectronics ToF могут найти широкий спектр применения. Несколько примеров приведены ниже:
- датчики приближения для роботов,
- диспенсеры для туалетной бумаги и мыла,
- слив в туалетах,
- смесители для раковины,
- датчики объектов в роботизированных пылесосах,
- дешевые детекторы присутствия пользователей в ноутбуках и мониторах,
- датчики присутствия и жестов в торговых точках,
- системы управления запасами в торговых автоматах,
- счетчики монет в торговых автоматах,
- наземные датчики приближения для дронов,
- бесконтактные детекторы потолков для внутренних беспилотников.
В отличие от бесконтактных детекторов на основе двумерных датчиков ToF или стереоскопических камер и нейронных сетей, стоимость встроенных бесконтактных датчиков STMicroelectronics относительно невелика, что позволяет включать их в различные конечные продукты для продажи в широком ценовом диапазоне.
Вывод
В настоящее время доступно много технологий определения расстояния, в том числе оптических и ультразвуковых, а также множество хороших решений, основанных на этих технологиях. Одной из последних технологий обнаружения приближения являются датчики времени полета. Они измеряют расстояние до цели, используя время переноса фотона в обоих направлениях от датчика к объекту и обратно.
Появление на рынке интегрированных датчиков, в том числе инфракрасных передатчиков и приемников, а также систем точной синхронизации, работающих с субнаносекундной точностью, делает использование этой технологии очень дешевым. Связанные с ними программные наборы позволяют пользователям проводить эксперименты и быстро создавать прототипы.